انکودر در صنعت آسانسور

روشهای کنترل سرعت موتور آسانسور هر چه که باشد (کنترل ولتاژ-فرکانس، کنترل برداری و…)، به دو صورت حلقه باز (Open Loop) و حلقه بسته (Close Loop) قابل اجرا میباشند. در حالت حلقه باز فیدبک سرعت از موتور به طور مستقیم در دسترس نیست و اینورتر سرعت موتور را بر اساس محاسبات خود پیشبینی میکند. این روش کنترل سرعت دقیق نیست و برای موتورهای با سرعت حداکثر 1 متر بر ثانیه پیشنهاد میشود.
انکودر دوار
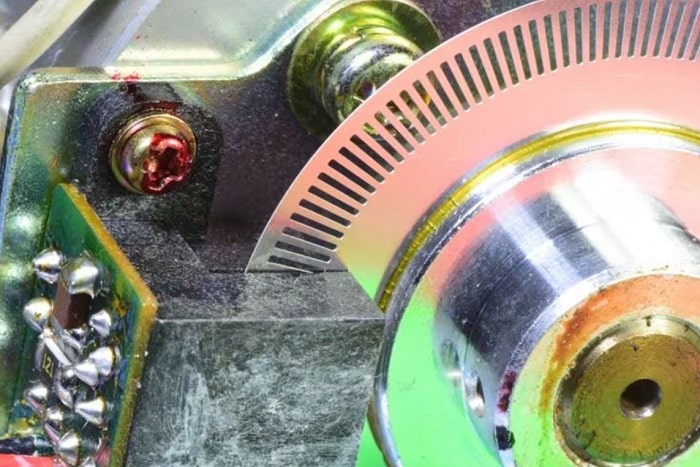
در حالت حلقه بسته، با استفاده از انکودر دوار (شفت انکودر) فیدبک سرعت در اختیار اینورتر قرار میگیرد و در نتیجه خروجی اینورتر همواره بر اساس سرعت لحظهای موتور تنظیم میشود. به این ترتیب تغییرات محیطی مانند بار کابین و ولتاژ شبکه در عملکرد سیستم تأثیر کمتری دارد.
انکودر افزایشی برای موتور های گیربکسی

در سیستم انواع آسانسور برای موتورهای گیربکسی از انکودرهای افزایشی استفاده میشود که صرفا فیدبک سرعت و جهت چرخش موتور را به دست میدهند، اما برای موتورهای گیرلس از انکودر مطلق استفاده میشود که علاوه بر دو پارامتر فوق، موقعیت دقیق موتور را نیز به دست میدهد. با توجه به این که کنترل موتورهای گیرلس در مُد Servo انجام شده و در این روش اساسا تشخیص موقعیت لحظهای شفت موتور لازم است، استفاده از انکودرهای افزایشی راهگشا نخواهد بود.
باید توجه داشت انکودر نصب شده روی موتور باید با اینورتر سیستم کنترلی سازگاری داشته باشد، در غیر این صورت امکان راهاندازی سیستم وجود ندارد. از شاخصهای مهم سازگاری هر انکودر با اینورتر میتوان به نوع ولتاژ تغذیه و تعداد پالس انکودر اشاره کرد (همانند موتور، این مشخصات روی پلاک انکودر درج شده است). یکی از پارامترهای مهم اینورترها، حداکثر فرکانس ورودی کارت انکودر است. این پارامتر تعیین کننده حداکثر تعداد پالسی است که کارت انکودر توانایی تشخیص آن را در هر دور دارد. اگر انکودری با تعداد پالس بیش از حداکثر فرکانس ورودی به کارت انکودر وصل شود، سیگنال فیدبک خراب شده و امکان کنترل در حالت حلقه بسته وجود ندارد.
نکات ایمنی
توجه داشته باشید که اتصال مکانیکی انکودر به شفت موتور از اهمیت بالایی برخوردار است. چنانچه اتصال به نحو صحیح انجام نشده باشد، با نوسانی شدن حرکت انکودر، فیدبک خروجی دچار خطا خواهد شد.
همچنین به خاطر داشته باشید هنگام کار با انکودر (به عنوان مثال زمان تعویض انکودر یا اتصال انکودر به اینورتر)، سر پینهای کابل انکودر یا قطعات الکترونیکی انکودر را لمس نکنید، چرا که تخلیه الکتریسیته ساکن موجود در بدن میتواند باعث خرابی انکودر شود.
مطالب پیشنهادی سیگما آسانبر: